

自动驾驶
汽车的智能化是汽车工业未来一段时间内着力发展的重点方向,而自动驾驶则是汽车智能化过程中最关键的核心技术。
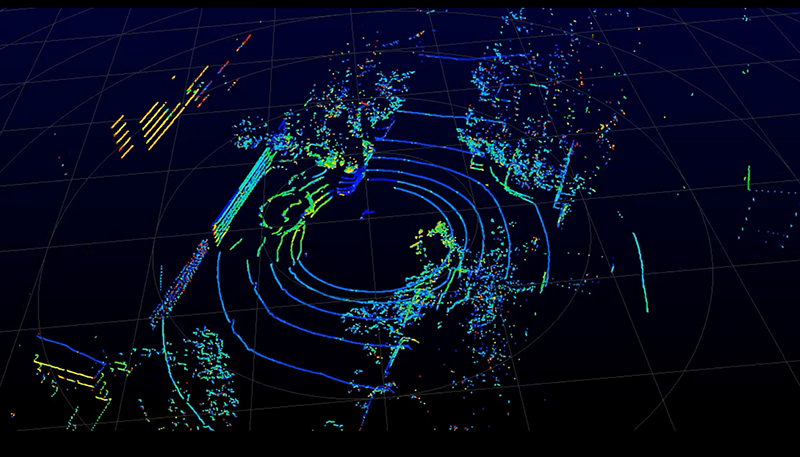
应用于汽车自动驾驶的LiDAR,必须能够快速可靠地感知车辆周围环境,尽可能细节丰富地创建周围环境和前方道路的3D图像。安装在快速行驶车辆上的LiDAR,需要能够“看到”前方至少150 m的距离,并探测高度小至10 cm的障碍物。
按照SAE(美国汽车工程学会)的划分,自动驾驶根据实现的彻底程度分为0~5五个级别,而完全的自动驾驶将是最终的目标。

辅助自动驾驶
辅助自动驾驶仍然需要人去完成主要的驾驶部分,只是增加了ADAS、ACC等功能,让驾驶更加安全高效。
例如在汽车的前后端安装激光雷达用于保证前后车辆的安全车距,避免发生追尾事故;在汽车的两侧安装激光雷达,既可以对两侧的安全距离进行监测,又可以防止车辆偏离正常车道,车辆转弯时还能对盲区进行安全预警。
完全自动驾驶
完全自动驾驶则是要求车辆彻底摆脱人员操控,乘车人就像乘坐公共交通一样,到站下车即可。
完全自动驾驶的解决方案,需要将激光雷达与GNSS、摄像头、毫米波雷达等其他传感器配合使用,并通过数据融合算法将各传感器的数据融合优化。最终能够根据外部环境信息直接指导车辆安全行驶,规避风险,面对突发情况快速反应,正确处理。


 微信订阅号
微信订阅号 微信服务号
微信服务号